Low Power GPS & Asset Tracking Solution Using Motion Wake-Up Sensors
Reduce GPS tracker power consumption by up to 70% while maintaining reliable motion-triggered operation.
- Ultra-low standby power (~nA level)
- No continuous sensing required
- Simplified MCU firmware
Challenges in GPS Tracker Design
Designing a low power GPS tracker is not just about reducing current—it requires balancing battery life, system responsiveness, and reliable motion detection.
Short battery life
Frequent battery replacement increases maintenance cost and limits deployment in remote applications.
High standby current
Continuous sensing components consume power even when the device is idle.
Complex firmware
Accelerometer-based systems require constant data processing and filtering algorithms.
Frequent false wake-up
Environmental noise or improper sensitivity settings can trigger unnecessary system activation.
These limitations prevent traditional designs from achieving true ultra-low-power operation in real-world deployments.
Motion Wake-Up Architecture for Low Power GPS Devices
A motion wake-up architecture eliminates continuous sensing and enables true ultra-low-power operation. Instead of continuously monitoring motion, the system remains inactive until a physical movement event occurs.
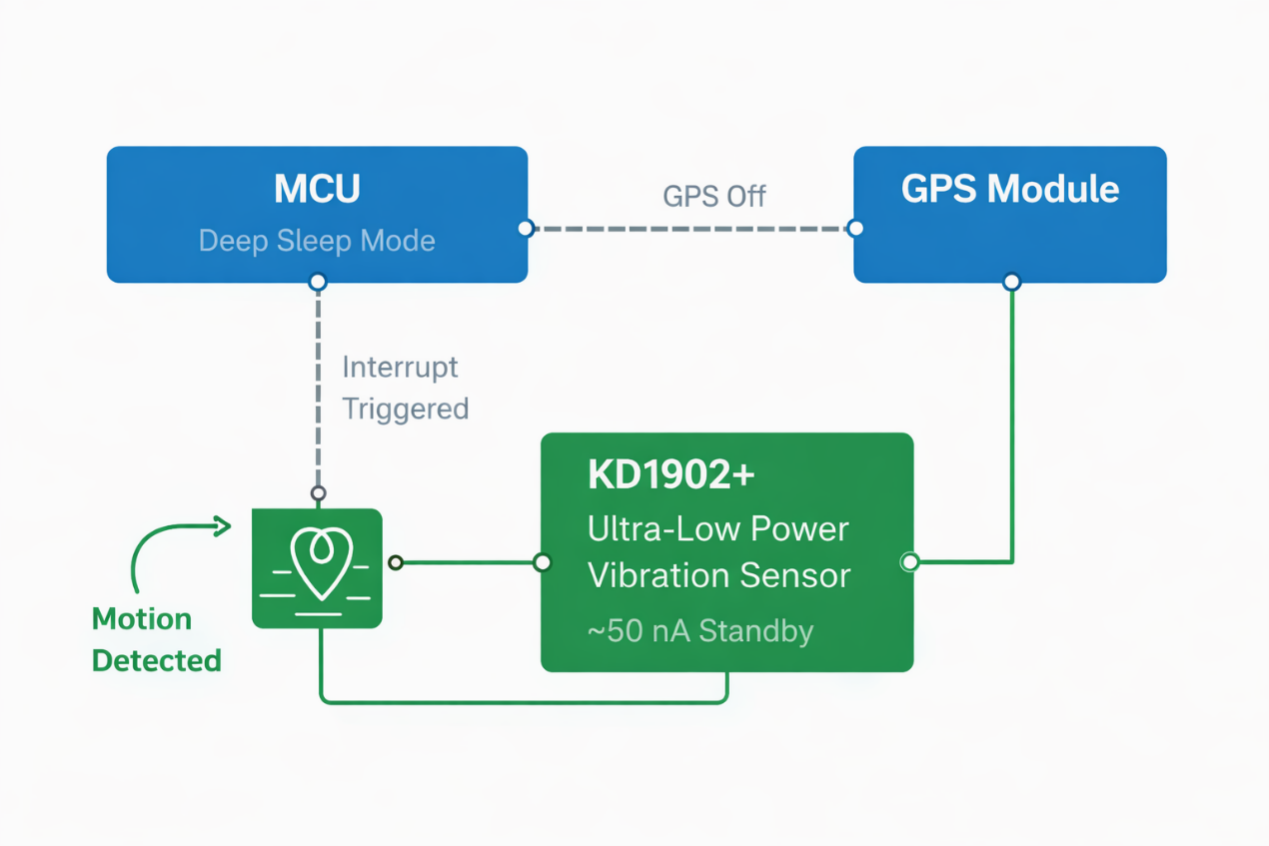
System behavior — idle
- •MCU remains in deep sleep during idle periods
- •GPS module stays completely powered off
- •Vibration sensor triggers an interrupt upon motion
When motion occurs
- →MCU wakes up instantly
- →GPS module is activated
- →Location data is transmitted
- →System returns to sleep
This event-driven design significantly reduces standby power consumption and extends battery life. This architecture is widely used in modern low power GPS tracking devices.
Accelerometer vs Motion Wake-Up Sensor
Compare accelerometer-based sensing with vibration-triggered wake-up to identify the most efficient solution.
| Feature | Accelerometer | Motion Wake-Up Sensor |
|---|---|---|
| Power consumption | Continuous µA-level | Near-zero (nA-level) |
| MCU state | Periodically active | Deep sleep |
| System architecture | Polling-based | Event-driven |
| Firmware complexity | High | Low |
| False triggers | Common | Minimal |
| Cost | Higher | Lower |
Real-World Results
Real-world implementation demonstrates up to 70% reduction in standby power consumption. Read the full case article:
Case study
GPS Tracker Power Optimization Case Study
Field-proven standby power reduction with motion-qualified wake-up — methodology and results in our blog article.
Read articleRecommended Sensors for Different Design Needs
Select the right vibration sensor based on sensitivity, power requirements, and application conditions.

Not sure which sensor fits your design? Our engineers can help you select the optimal solution.
Start Building Your Low Power GPS Tracker Today
Our engineering team provides reference designs, integration support, and evaluation samples to accelerate your development.